![[boussole]](/images/PocketClock.png) POMDP, une démo en ligne : guide de
l'interface
POMDP, une démo en ligne : guide de
l'interface
Les pages sur le POMDP :
- Page principale
- Description détaillée
- Guide de l'interface (cette page)
Guide de l'interface
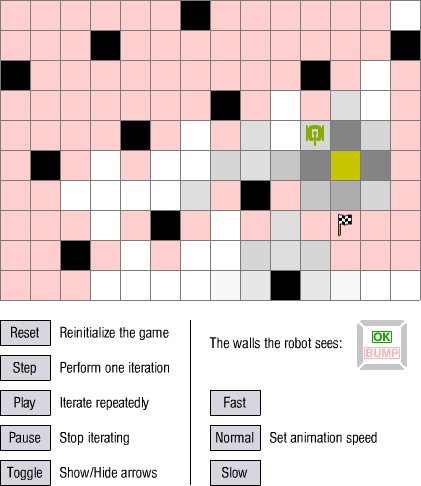
Voici une image de la simulation en cours d'exécution. Les différents éléments qui la composent sont détaillés dans le tableau ci-dessous.
| Élément | Description |
|---|---|
 |
Réinitialise le jeu. Le robot est ramené à la case de départ, le jeu peut commencer. |
 |
Réalise une seule itération, à savoir :
|
 |
Réalise en boucle l'itération décrite précédemment jusqu'à ce que l'utilisateur l'interrompe ou qu'il atteigne le drapeau. |
 |
Interrompt la boucle commencée avec le bouton Play. |
 |
Montre ou cache des flèches qui visualisent l'action que le robot prendra en fonction de la case où il se croit. |
 |
Règle la vitesse de l'animation montrant le mouvement du robot. Cette vitesse dépend aussi de la puissance de votre ordinateur. |
 |
Le robot. Désolé, c'est en fait un tank. Si vous avez une idée de graphisme moins guerrier, je suis preneur |
 |
Le drapeau. Le robot doit atteindre cette case. |
 |
Une case vide du labyrinthe. La case est rouge, ce qui signifie que le robot pense qu'il n'a aucune chance d'être à cet endroit. |
 |
Un mur. Le robot ne peut pas y aller. |
 |
Des cases. Le niveau de gris traduit la probabilité d'être dans chaque case : plus la case est sombre, plus le robot croit qu'il est probable qu'il soit ici. |
 |
La case où le robot croit être. Parmi toutes les cases où le robot croit pouvoir être, cette case est la plus probable. Plus le jaune est clair, plus la certitude d'être dans cette case est forte. Lorsque le robot n'est pas sur la case jaune, il est « perdu ». C'est en fonction de cette case que le robot va prendre sa décision de mouvement (voir le bouton Toggle). |
 |
Les détecteurs de murs. Chaque détecteur est noir lorsqu'un mur est détecté et clair (comme dans cet exemple) sinon. Au centre deux voyants montrent si le robot a percuté un mur. Cette indication est fournie à l'utilisateur/observateur, mais le robot ne sait pas s'il a percuté un mur ou non. |
Revenir en haut de la page.